0086-731-52373830 info@sunyinstrument.com

Machine vision system application flexible production line
How to move the machine vision system application production line into the classroom and reproduce common machine vision applications efficiently and intuitively is something we have been working hard on over the years. It needs to be safe to use, suitable for real applications, and easy to switch between different application scenarios, compact size, appropriate cost and other factors, so we have launched a group-station machine vision system application flexible production line based on machine vision application technology as a carrier, combined with PLC control and robot execution units. Users can choose a single station or multi-station according to their needs. combination, and can customize the experimental content and practical training courses required by the school. Rich scalability, able to expand independent PLC, motion control, sensors, industrial Internet and other units.
Features:
1) Be able to carry out practical training related to machine vision, industrial robots, motion control, PLC control, and industrial Internet to meet the teaching needs of courses such as "Industrial Robot Application Technology", "Machine Vision System Application", and "PLC Technology and Application".
2) Highly flexible and high-precision structural design, which can be used for continuous production such as item assembly, intelligent detection, performance testing, packaging, etc. in 3C, automobile, machinery, biology, food and other industries. Using segmented design, each work station can Working independently, it is convenient for teaching and research and development. Protocol communication is used between workstations to support the direct transmission of pallets or items. It is suitable for the production of various random small products. The number of workstations can be cut and expanded to suit different application scenarios and budgets.
3) Modular vision unit supports static and online dynamic detection, supports 2D and 3D industrial cameras (including line array cameras and line laser profile sensors), and also supports various common light sources.
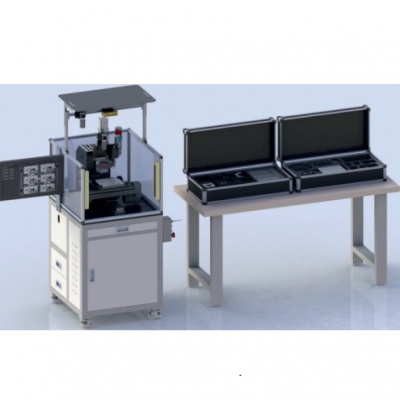
Visual unit:
1) Configure the Kvision Box machine vision application module, which integrates visual applications and peripheral device communication and control. It integrates two USB3.0 cameras and four PoE GigE cameras, which can collect at the same time, and supports RS232, RS485, TCP/IP and other communications. method, supporting motion control and GPIO expansion. Supports four-way light source control and can be externally triggered. A fully independent brand online visual inspection unit that supports common camera types such as area array, line array, 3D line laser, and binocular;
2) Equipped with an independent control and image processing system, it can operate as a single machine, optionally with a multi-channel sorting and rejection module, or multiple machines can be connected in series (IO or protocol communication);
3) Modular flow channel, stepper motor control, with encoder position feedback, internal backlighting, and can be equipped with multiple sets of trigger sensors and brake cylinders;
4) The image acquisition module is multi-dimensionally adjustable and has a compatible installation design that can adapt to multiple types of cameras and light sources;
5) Visualization of motion status and recognition images, making the results clearer;
6) Comes with rich peripherals, making development and testing more convenient.
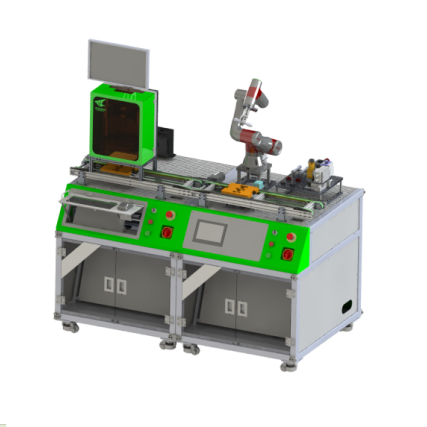
Execution unit:
Function: Cooperate with the front-end vision unit for sorting and assembly, and choose a six-axis industrial robot;
Equipped with visual positioning and hand-eye integration, it can meet the needs of various scenarios;
Profile base plate, equipped with various expansion units for easy installation;
Comes with rich peripherals, making development and testing more convenient.
Experiment content:
No. | Experimental project | Experiment content |
1 | Robot control and programming experiment
| Basic understanding of robot coordinate system |
The operation of the coordinate system | ||
Robot programming instructions and methods | ||
Robot IO point operation | ||
Robot handling | ||
Robot trajectory | ||
Robotics and visual communication | ||
2 | Machine vision experiment | Visual calibration (image and hand-eye calibration) |
Bottle cap positioning and sorting | ||
Mechanical parts measurement and sorting | ||
Tangram identification and assembly | ||
Barcode and QR code recognition and sorting | ||
Computer key assembly | ||
Printing logo defect sorting | ||
Luban lock assembly | ||
Conveyor belt tracking and grabbing | ||
Deep learning sorting of fruits (or medicinal materials) |